Benchmark Results
Robot person following (RPF)---mobile robots that follow and assist a specific person---has emerging applications in personal assistance, security patrols, eldercare, and logistics. To be effective, such robots must follow the target while ensuring safety and comfort for both the target and surrounding people. In this work, we present the first comprehensive study of RPF, which (i) surveys representative scenarios, motion-planning methods, and evaluation metrics with a focus on safety and comfort; (ii) introduces Follow-Bench, a unified benchmark simulating diverse scenarios, including various target trajectory patterns, crowd dynamics, and environmental layouts; and (iii) re-implements six representative RPF planners, ensuring that both safety and comfort are systematically considered. Moreover, we evaluate the two best-performing planners from our benchmark on a differential-drive robot to provide insights into real-world deployment of RPF planners. Extensive simulation and real-world experiments provide quantitative study of the safety-comfort trade-offs of existing planners, while revealing open challenges and future research directions.
We focus on two critical and quantifiable requirements that are frequently prioritized: safety and comfort:
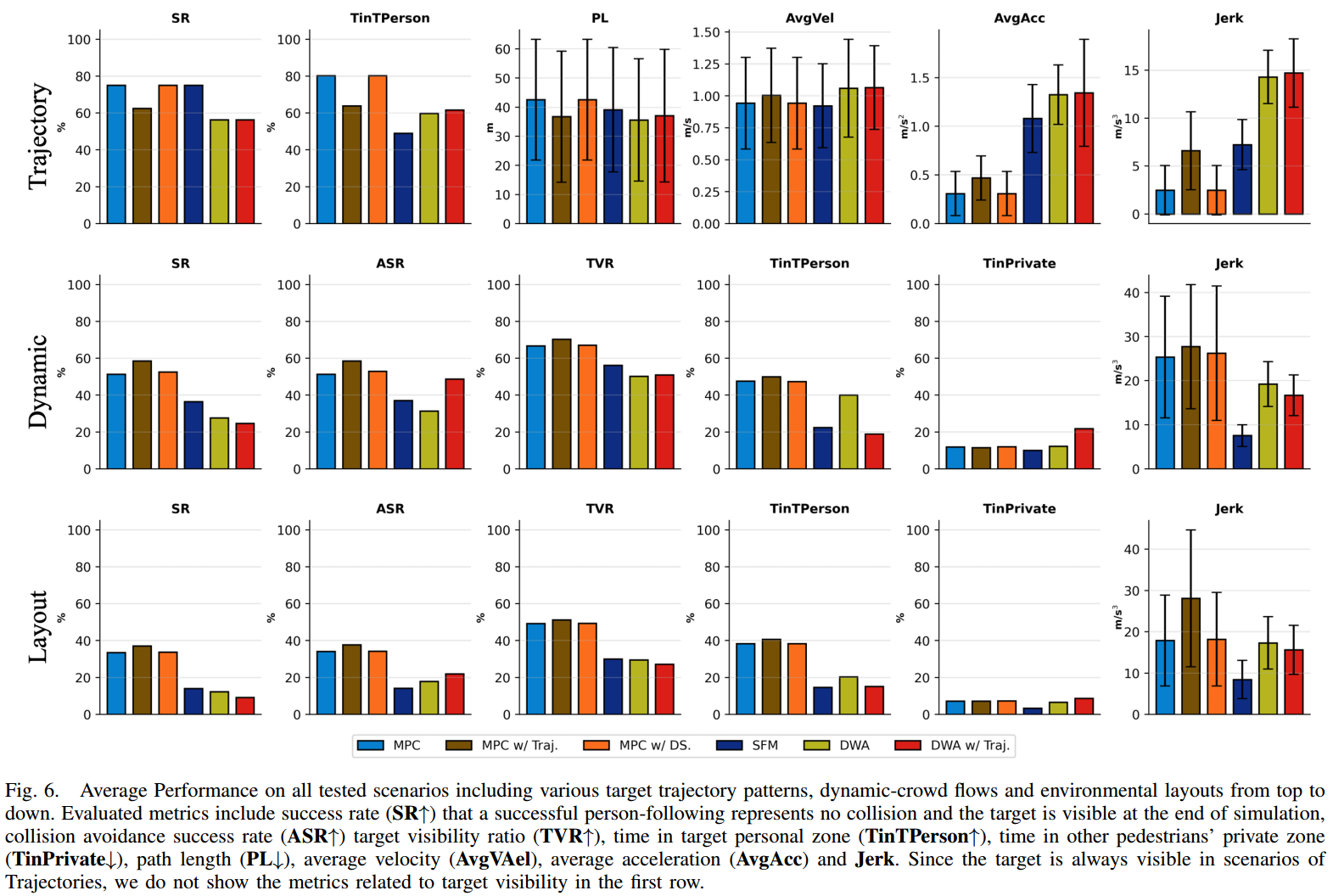
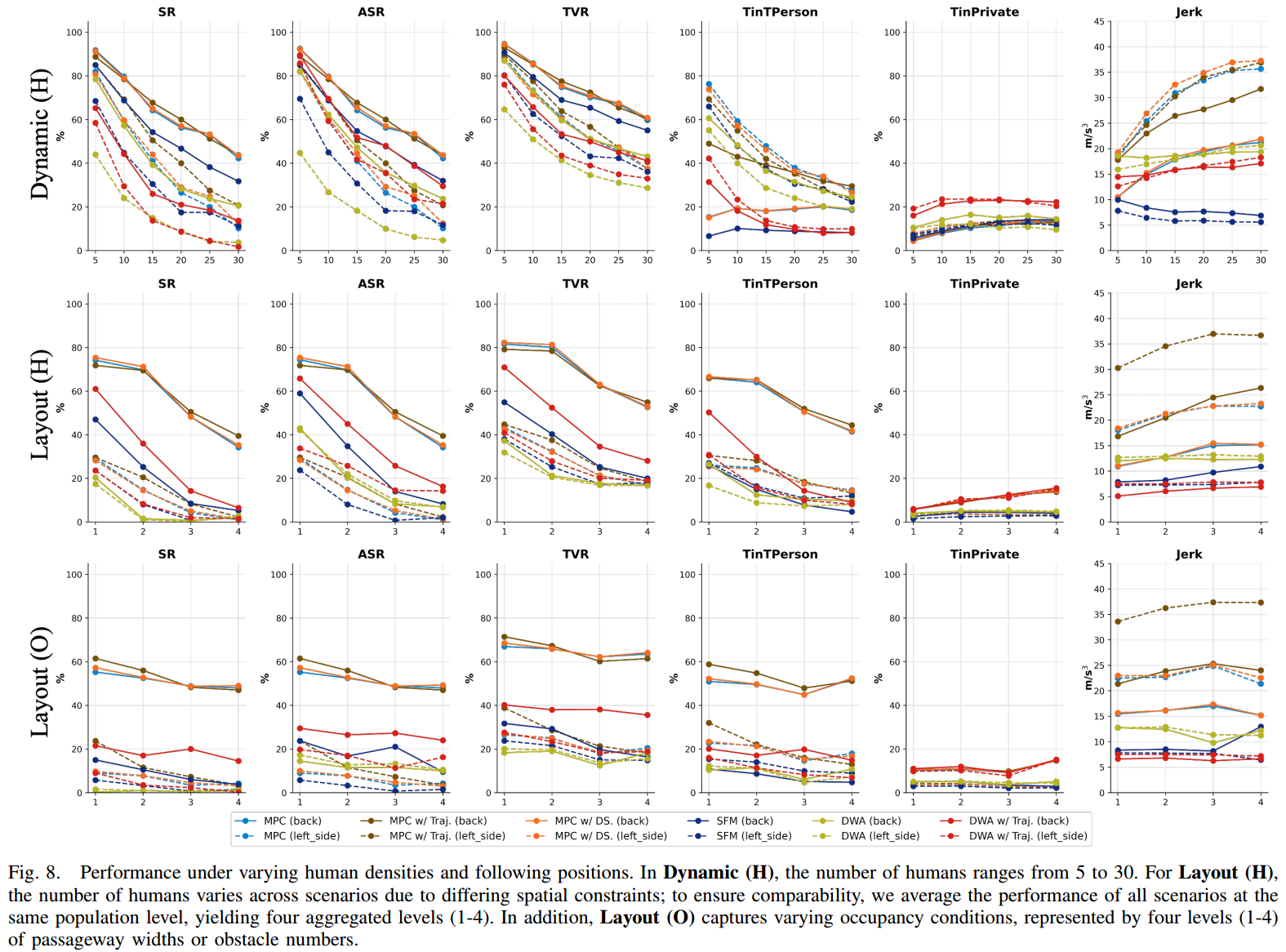
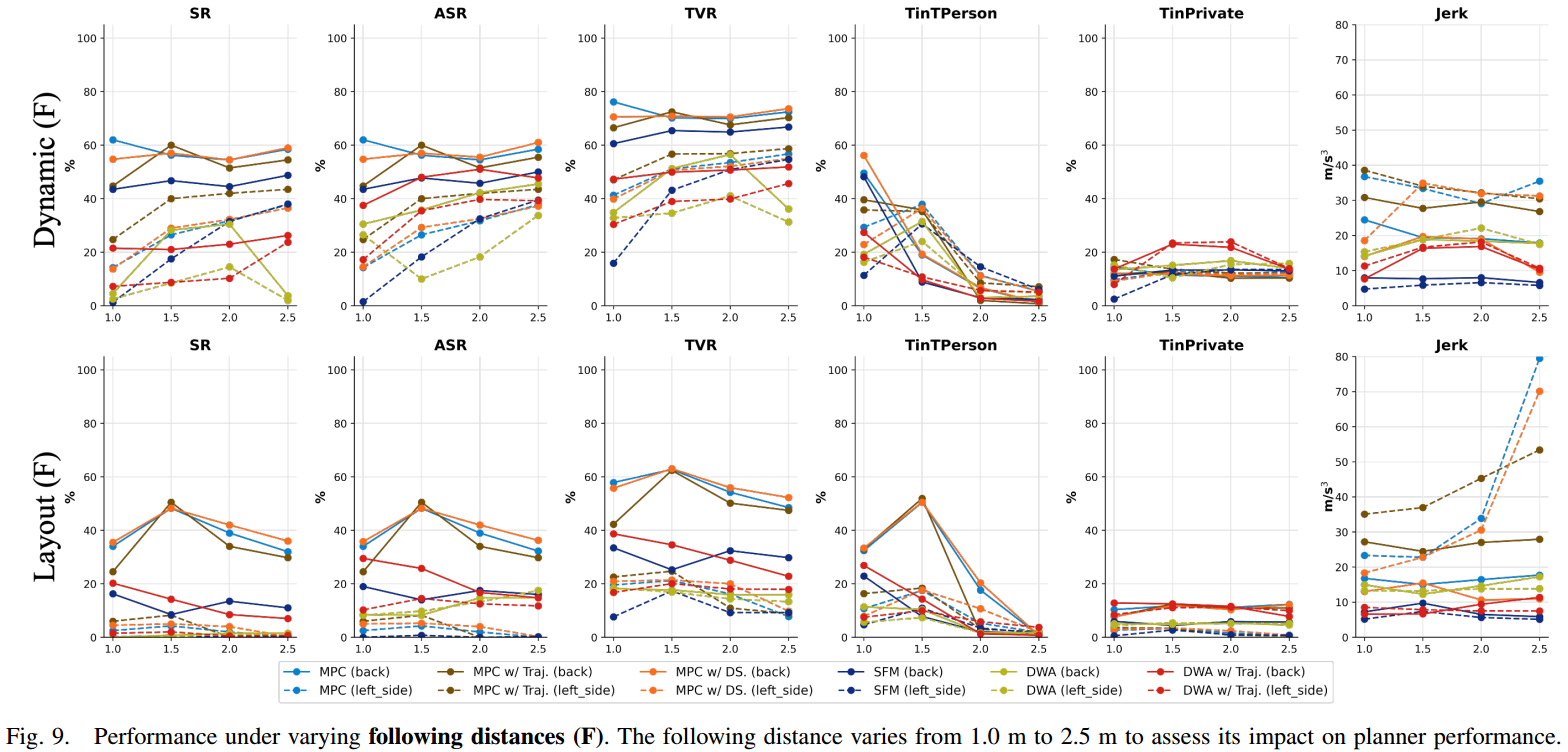
Guided by these two requirements, we comprehensively review RPF-related scenarios that challenge safety and comfort, and the evaluation metrics used to assess performance with respect to these requirements. Furthermore, the reviewed RPF planners are analyzed with an emphasis on how they are designed to address these two key requirements. To enable systematic performance evaluation, we introduce Follow-Bench, a unified benchmark for evaluating RPF planners under diverse conditions, including various target trajectory patterns, pedestrian-flow patterns, and environmental layouts. We re-implement six popular RPF planners, ensuring that both safety and comfort are systematically considered, including: MPC-based, MPC w/ Traj., MPC w/ DS., SFM-based, DWA-based and DWA w/ Traj.
MPC w/ Traj. provides smoother motion than MPC-based.
MPC w/ Traj. can generate wider-arc motions to avoid collision or stuck, but suffers from temporary target loss under limited camera FoV and may reduce user comfort.
Both MPC w/ Traj. and MPC are reactive rather than proactive, as they do not explicitly model pedestrian motion.